缩实现管道的机器人自主检测作业,包括锅炉四管及主蒸汽管道等。兼具视频监测、红外测温、超声测厚、超声探伤、漏磁检测等功能,规划设计配套的检测策略,采用“粗—精”定位策略,实现缺陷的精确定位和准确识别。

管道外检测机器人

管道外检测机器人

管道内检测机器人

管道内检测机器人
提供可沿巡检路径或固定轨道移动行进、自主避障、集红外/激光/可见光等非接触检测技术的巡点检机器人,进行自主导航、智能检测、分析报告等作业,形成巡点检-故障预警一体化的功能平台。
1. 移动机器人载体及定位导航技术
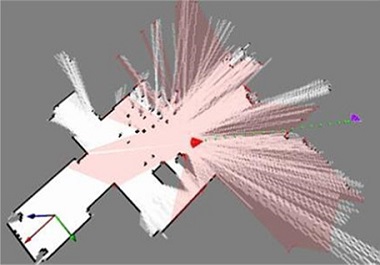
缩进 轮式巡检机器人:采用轮式移动小车载体,结合SLAM与LMS /Dr定位与导航技术,可实现复杂环境下的自主避障与导航。
缩进 挂轨式巡检机器人:采用可升降轨道机器人载体,通过设定预置位实现定巡点检作业。
2. 巡点检项目
缩进采用可见光、红外、激光等设备,融合气体、声音等多传感器技术,实现包括测温型、测振型、数量型、观测型在内的全方位巡点检。
3. 系统优势与创新
缩进 巡检信息深度分析与故障预警一体化系统:提供振动信号时/频分析、温度场分析、异常声信号与振动溯源分析等功能,提高分析深度及巡检作业的智能化。
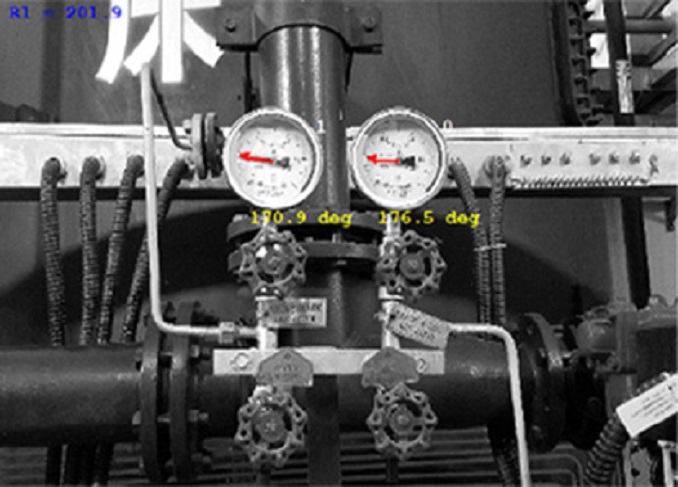
缩进 基于图像识别的设备状态监测:具备自动图像识别功能,实现对各类仪表读数以及对刀闸、开关、指示灯和设备“跑冒滴漏”等故障的检测。












 400-109-9595
400-109-9595






